✈️ Aerospace Sealing Automation – The Dosing Is Solved. The Real Challenge Is Everything Around It. 🤖
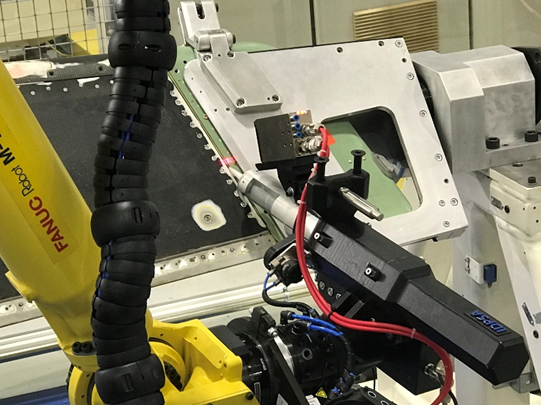
After years of development and real-world testing, our aerospace sealing head operating daily in production at aircraft manufacturing facilities. And this hands-on experience has shown us one thing very clearly:
💡 The dosing works. It’s consistent, reliable, and repeatable.
That’s why we’ve decided to focus our business on providing the sealing head — and supporting our clients with the knowledge they need to make the rest of the system work.
Because while the tool is ready…
The real complexity begins once the robot starts moving.
🧩 One Application, Many Challenges
There is no “standard” aerospace sealing use case. You may need:
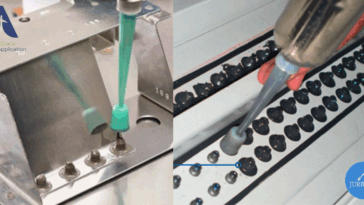
- A stable fillet bead with strict geometry
- Overlap sealing across panels
- Fastener encapsulation, over thousands of rivets
- Or sealing on complex 3D surfaces, under tight accessibility conditions
Each requires a unique combination of path planning, orientation control, speed regulation, and sometimes rework strategies.
⚙️ The Myth of Smooth Trajectories
We often hear: “Just use splines — it’ll be smoother.”
Yes, but also:
👉 Splines often reduce trajectory precision, especially when dealing with sudden changes in direction, complex surface normals, or tight tolerances.
👉 Even with all the motion parameters manufacturers provide (blending radius, acceleration limits, velocity smoothing), the real path can deviate — and that deviation impacts bead quality.
To make things harder, robot controllers don’t always tell the truth about TCP speed. What they “report” and what actually happens during execution can differ — especially on sharp curves or when carrying heavier tools.
And let’s not forget:
🤖 Most industrial robots are still designed around point-to-point (P2P) logic for tasks like pick-and-place, not for constant-speed, orientation-controlled trajectory execution — which is exactly what sealing requires.
🪤 The Real-World Constraints

Even with good programming, physical realities impose limits:
- The weight and size of the sealing head
- Cable routing, which adds drag and limits range of motion
- Part positioning, especially on very large or very small components
- Accelerations, which introduce vibrations or “overshoot” during corners
And of course, aerospace production is a world where:
- Cadences are low
- Quality requirements are extremely high
- Environments are far from ideal
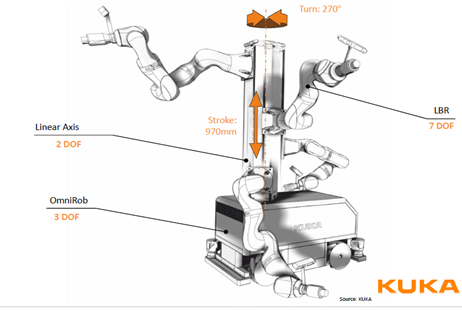
Add to that the rise of collaborative robots, which, although useful in some cases, tend to have slower kinematics and lower structural stiffness, introducing potential precision and speed limitations — often underestimated during planning.
🤝 Include the End Users. Always.
No matter how good the system looks on paper — the success of any robotic sealing application depends on the final users. The technicians, engineers, and operators who will use the system daily must be part of the process from day one.
Their feedback on usability, accessibility, and reliability is what turns a robotic cell into a long-term solution — or a long-term headache.
💰 The Harsh Reality of ROI
And after dealing with all of this — motion planning, integration challenges, mechanical constraints, software tuning, process variability — there’s still one more thing:
📉 It all needs to fit into a business case.
ROI expectations in the aerospace sector are typically between 1.5 and 2 years.
That’s tough — especially when:
⚠️ Clients expect 100% automation of the process
⚠️ But the last 5–10% of automation often costs as much as the first 90%
This is where expectations and reality often clash. Full automation is desirable, but not always efficient — and knowing when to stop is just as important as knowing where to start.
🚀 Our Role in All This

We’ve spent over a decade working on robotic aerospace sealing.
Our sealing head is proven. It’s in production.
And going forward, that’s what we offer:
A robust, production-grade sealing head — and the expert support to help you integrate it properly into your own robotic system.
We’re not here to program your robot.
We’re here to make sure you don’t overlook the hard parts.
Let’s Talk
👉 Are we underestimating the true complexity of robot motion in sealing?
👉 Are we setting realistic expectations for automation in aerospace environments?
👉 Are we designing processes that make sense — technically and economically?
We’d love to hear your experiences. Let’s open the discussion.
Because applying sealant with a robot isn’t about whether it can move.
It’s about whether it can move the right way, every time, in your real factory.