✈️ Aerospace Sealing Automation – The Dosing Is Solved. The Real Challenge Is Everythi✈️ Automatisierung der Dichtstoffapplikation in der Luft- und Raumfahrt – Die Dosierung ist gelöst. Die wahre Herausforderung ist alles drumherum. 🤖ng Around It. 🤖
Nach Jahren der Entwicklung und Praxistests ist unser Versiegelungskopf für die Luft- und Raumfahrt täglich in der Produktion von Flugzeugherstellungsanlagen im Einsatz. Diese praktische Erfahrung hat uns eines sehr deutlich gezeigt:
💡 Die Dosierung funktioniert. Sie ist konsistent, zuverlässig und wiederholbar.
Deshalb haben wir beschlossen, unser Geschäft auf die Bereitstellung des Versiegelungskopfes zu konzentrieren – und unsere Kunden mit dem Wissen zu unterstützen, das sie benötigen, damit der Rest des Systems funktioniert.
Denn während das Werkzeug bereit ist…
Beginnt die eigentliche Komplexität erst, wenn der Roboter anfängt, sich zu bewegen.
🧩 Eine Anwendung, viele Herausforderungen
Es gibt keinen Standard-Anwendungsfall für die Versiegelung in der Luft- und Raumfahrt. Sie benötigen vielleicht:
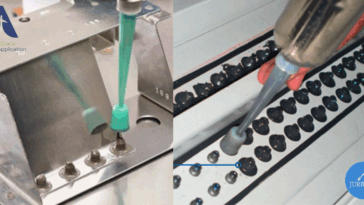
- Eine stabile Kehlnaht mit strenger Geometrie
- Überlappungsdichtung über Paneele hinweg
- Verkapselung von Befestigungselementen über Tausende von Nieten
- Oder die Versiegelung komplexer 3D-Oberflächen unter engen Zugänglichkeitsbedingungen
Jeder Fall erfordert eine einzigartige Kombination aus Bahnplanung, Orientierungssteuerung, Geschwindigkeitsregelung und manchmal Nacharbeitsstrategien.
⚙️ Der Mythos der glatten Trajektorien
Wir hören oft: Verwenden Sie einfach Splines – das wird reibungsloser ablaufen.
Ja, aber auch:
👉 Splines reduzieren oft die Bahnpräzision, insbesondere bei plötzlichen Richtungswechseln, komplexen Oberflächennormalen oder engen Toleranzen.
👉 Selbst mit all den Bewegungsparametern, die Hersteller bereitstellen (Verrundungsradius, Beschleunigungsgrenzen, Geschwindigkeitsschmierung), kann die reale Bahn abweichen – und diese Abweichung beeinflusst die Qualität der Raupe.
Um die Sache zu erschweren, sagen Robotersteuerungen nicht immer die Wahrheit über die TCP-Geschwindigkeit. Was sie berichten und was tatsächlich während der Ausführung passiert, kann sich unterscheiden – besonders in scharfen Kurven oder beim Tragen schwererer Werkzeuge.
Und vergessen wir nicht:
🤖 Die meisten Industrieroboter sind immer noch auf der Punkt-zu-Punkt-Logik (P2P) für Aufgaben wie Pick-and-Place konzipiert, nicht für die Ausführung von Trajektorien mit konstanter Geschwindigkeit und kontrollierter Orientierung – was genau das ist, was die Versiegelung erfordert.
🪤 Die Einschränkungen der realen Welt

Selbst bei guter Programmierung setzen physikalische Realitäten Grenzen:
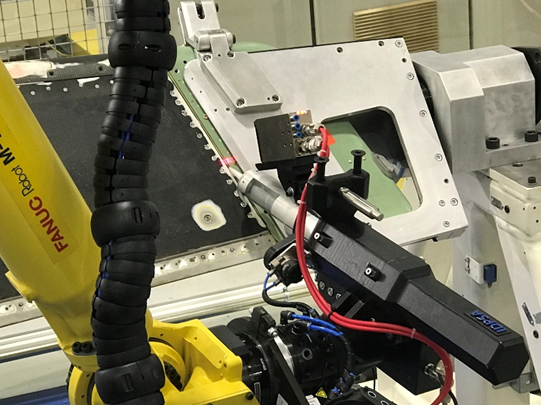
- Das Gewicht und die Größe des Versiegelungskopfes
- Die Kabelführung, die Widerstand erzeugt und den Bewegungsspielraum einschränkt
- Die Positionierung der Teile, insbesondere bei sehr großen oder sehr kleinen Komponenten
- Beschleunigungen, die Vibrationen oder Überschwingen in Kurven verursachen
Und natürlich ist die Luft- und Raumfahrtproduktion eine Welt, in der:
- Die Taktraten niedrig sind
- Die Qualitätsanforderungen extrem hoch sind
- Die Umgebungen alles andere als ideal sind
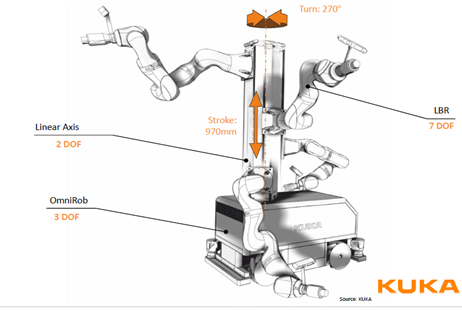
Hinzu kommt der Aufstieg kollaborativer Roboter, die zwar in einigen Fällen nützlich sind, aber zu langsamerer Kinematik und geringerer struktureller Steifigkeit neigen, was potenzielle Präzisions- und Geschwindigkeitsbeschränkungen mit sich bringt – was bei der Planung oft unterschätzt wird.
🤝 Beziehen Sie die Endbenutzer ein. Immer.
Egal wie gut das System auf dem Papier aussieht – der Erfolg jeder robotergestützten Versiegelungsanwendung hängt von den Endbenutzern ab. Die Techniker, Ingenieure und Bediener, die das System täglich nutzen werden, müssen vom ersten Tag an Teil des Prozesses sein.
Ihr Feedback zu Benutzerfreundlichkeit, Zugänglichkeit und Zuverlässigkeit macht aus einer Roboterzelle eine langfristige Lösung – oder ein langfristiges Kopfzerbrechen.
💰 Die harte Realidad des ROI
Und nachdem man sich mit all dem beschäftigt hat – Bewegungsplanung, Integrationsherausforderungen, mechanische Einschränkungen, Software-Tuning, Prozessvariabilität – gibt es noch eine Sache:
📉 Alles muss in einen Business Case passen.
Die ROI-Erwartungen im Luft- und Raumfahrtsektor liegen typischerweise zwischen 1,5 und 2 Jahren.
Das ist hart – besonders wenn:
⚠️ Kunden eine 100-prozentige Automatisierung des Prozesses erwarten
⚠️ Aber die letzten 5–10 % der Automatisierung oft so viel kosten wie die ersten 90 %
Hier prallen Erwartungen und Realität oft aufeinander. Vollständige Automatisierung ist wünschenswert, aber nicht immer effizient – und zu wissen, wann man aufhören muss, ist genauso wichtig wie zu wissen, wo man anfangen soll.
🚀 Unsere Rolle in all dem

Wir haben über ein Jahrzehnt an der robotergestützten Versiegelung in der Luft- und Raumfahrt gearbeitet.
Unser Versiegelungskopf ist bewährt. Er ist in der Produktion.
Und in Zukunft ist es das, was wir anbieten:
Einen robusten Versiegelungskopf in Produktionsqualität – und die fachliche Unterstützung, um Ihnen bei der ordnungsgemäßen Integration in Ihr eigenes Robotersystem zu helfen.
Wir sind nicht hier, um Ihren Roboter zu programmieren.
Wir sind hier, um sicherzustellen, dass Sie die schwierigen Aspekte nicht übersehen.
Lassen Sie uns reden
👉 Unterschätzen wir die wahre Komplexität der Roboterbewegung beim Versiegeln?
👉 Setzen wir realistische Erwartungen an die Automatisierung in Luft- und Raumfahrtumgebungen?
👉 Entwerfen wir Prozesse, die technisch und wirtschaftlich sinnvoll sind?
Wir würden gerne von Ihren Erfahrungen hören. Lassen Sie uns die Diskussion eröffnen.
Denn beim Auftragen von Dichtstoff mit einem Roboter geht es nicht darum, ob er sich bewegen kann.
Es geht darum, ob er sich jedes Mal auf die richtige Weise in Ihrer echten Fabrik bewegen kann.